智能车运动控制科研团队隶属于汽车工程学院,研究对象为小型地面机器人(包括巡检机器人、服务机器人及特种机器人等),主要研究方向是该类机器人的导航与控制问题,包括机器人操作系统(ROS)、人工智能相关技术、嵌入式控制系统的开发三个方面。
团队自成立以来,承担横向课题5项,累计申请发明专利4项,发表学术论文4篇,其中以学生为第一作者2篇;指导学生参加省级重点大创项目1项,目前已顺利结题;在省级以上各类竞赛中获奖12项,其中,在2020年荣获第八届全国大学生光电设计竞赛创意组全国二等奖;在2021年江苏省第七届“互联网+”大学生创新创业大赛中荣获三等奖。
目前团队配有高速无人驾驶验证平台1套(PixLoop,速度科达100Km/h)、1套Bulldog低速移动机器人、3套自研低速无人平台、5套用于教学的低速无人平台,还配备有单线/多线激光雷达、毫米波雷达、高精度组合导航设备、Nvidia Xavier计算平台、40余套RoboMaster A型开发板和M3508电机等设备,为机器人操作系统(ROS)下开发、人工智能、嵌入式等开发提供了丰富的软硬件平台。
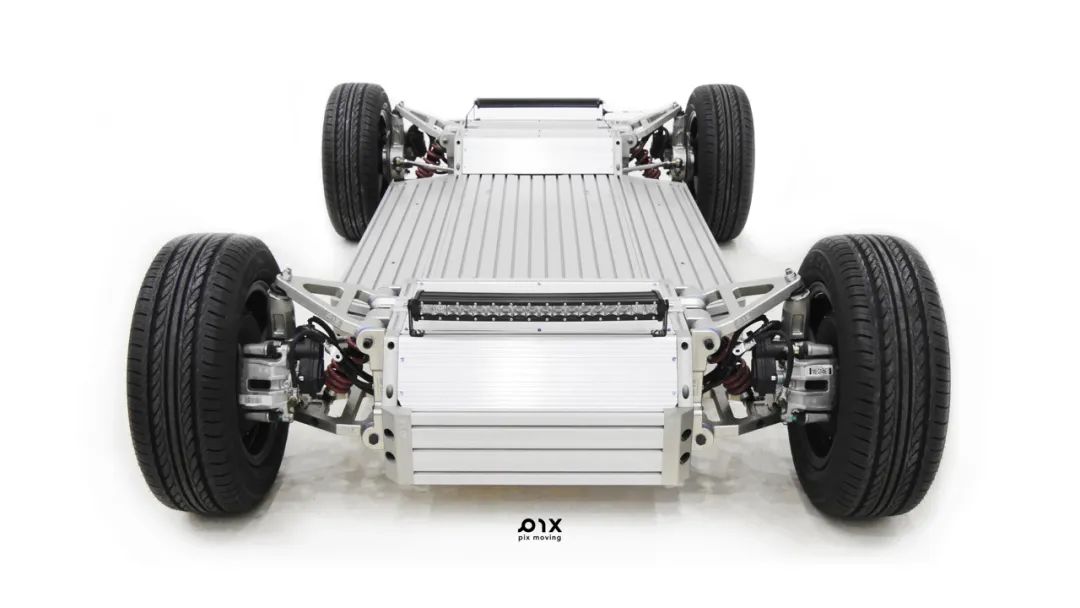
PixLoop高速无人驾驶验证平台

Bulldog低速移动机器人

16线激光雷达

Nvidia Xavier计算平台
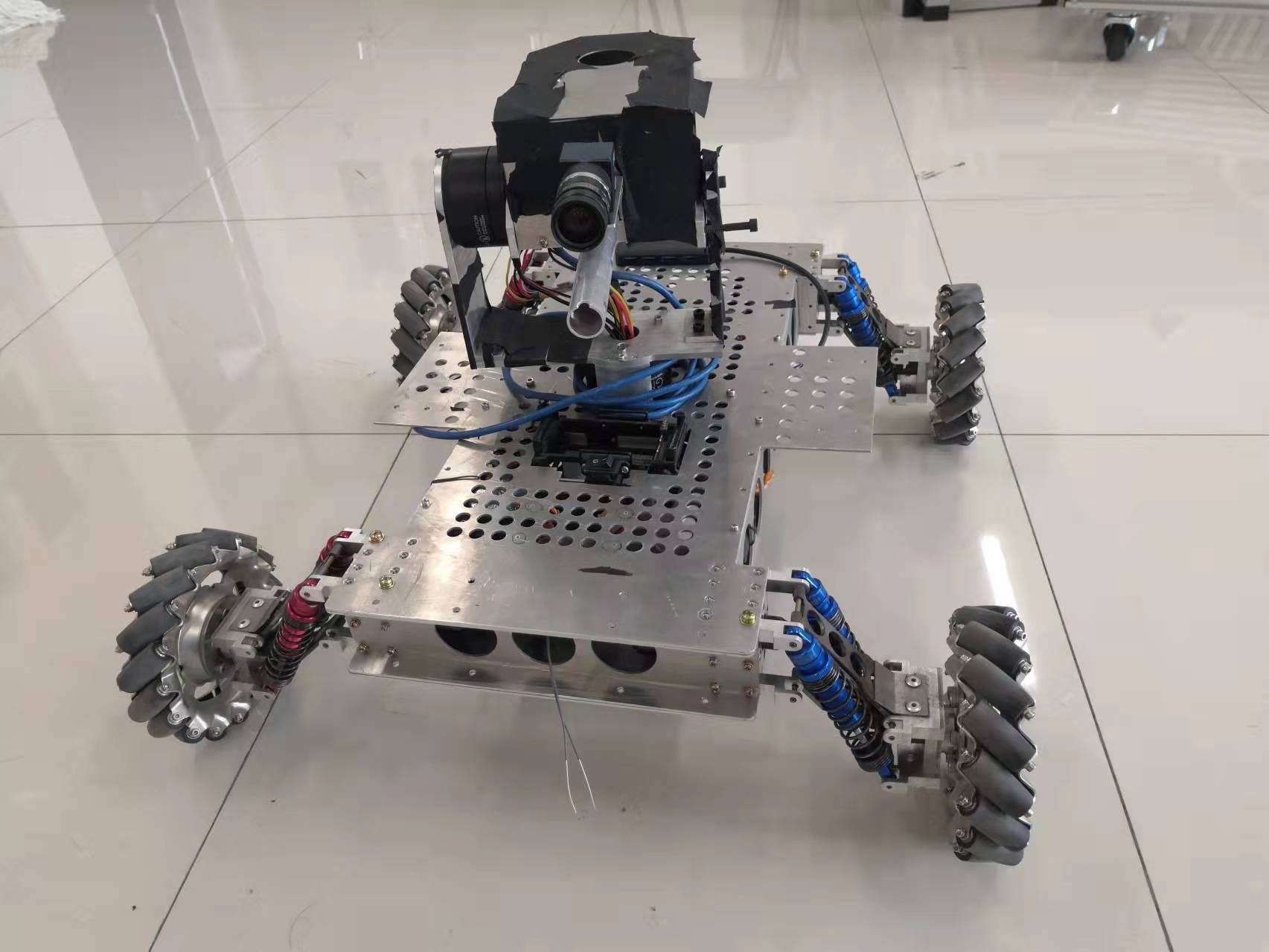
自研机器人平台
成果: